Generación automática de memes de Internet a través de una red neuronal profunda
T E S I S
Que para obtener el grado de
Licenciado en en Ciencias de la Computación
presenta
Albert Manuel Orozco Camacho, @AlOrozco53,
Tarea

Motivación

Memética
¿Trabajo previo? 🤔

Aprendizaje Automático
Objetivo de la mayoría del software:
$\downarrow$
ALGORITMO: $z = h(\vec{x})$
$\downarrow$
SALIDA: $z$
Aprendizaje automático
(Supervisado)
ENTRADA: $\vec{x}$
$\downarrow$
ALGORITMO: $z = h(\vec{x}, \vec{\theta})$
$\updownarrow$
Entrenamiento: $J(\vec{\theta}; \vec{x}, \vec{y})$
$\downarrow$
SALIDA: $z$
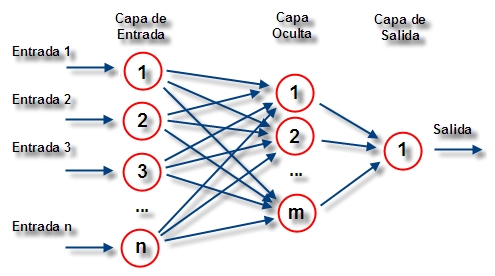
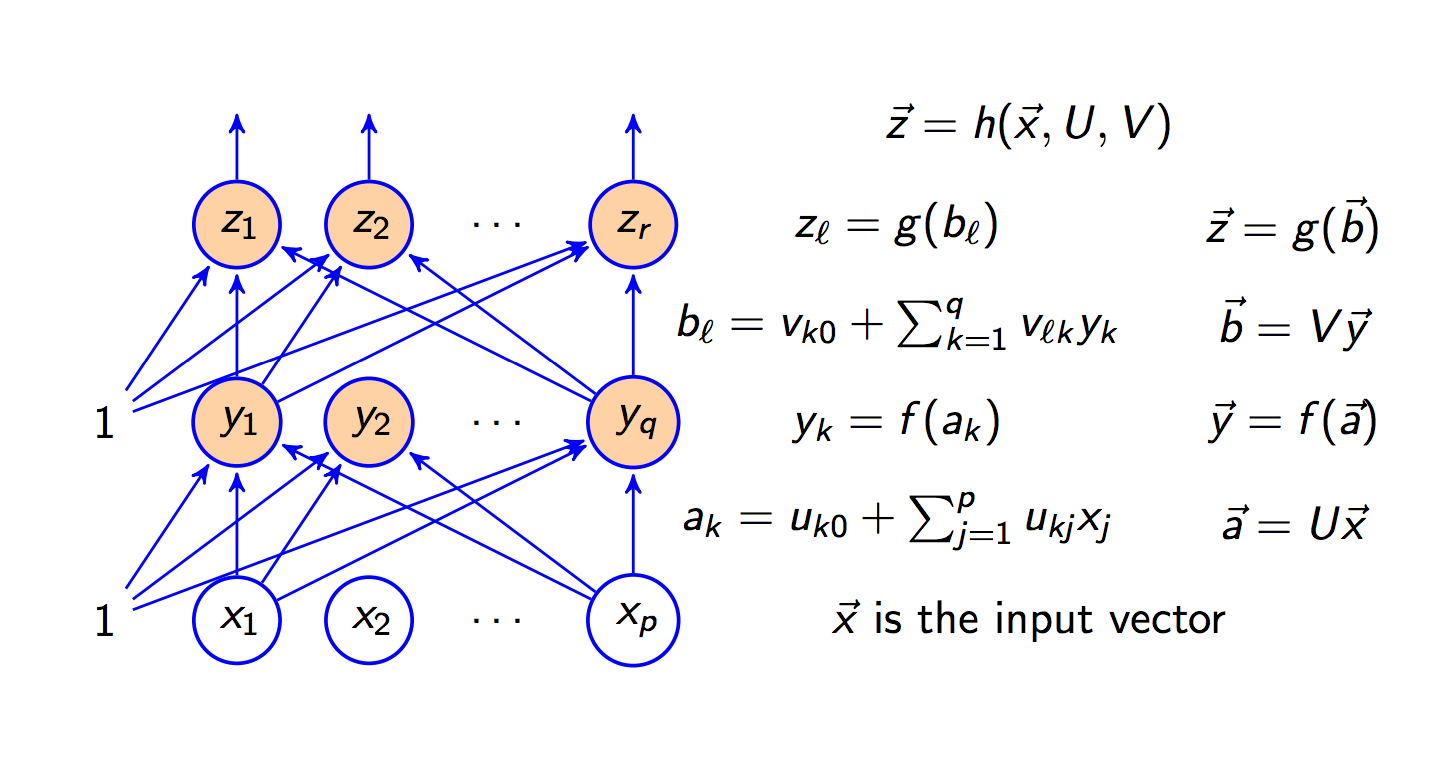
Redes neuronales
Aprendizaje profundo
(Deep Learning)
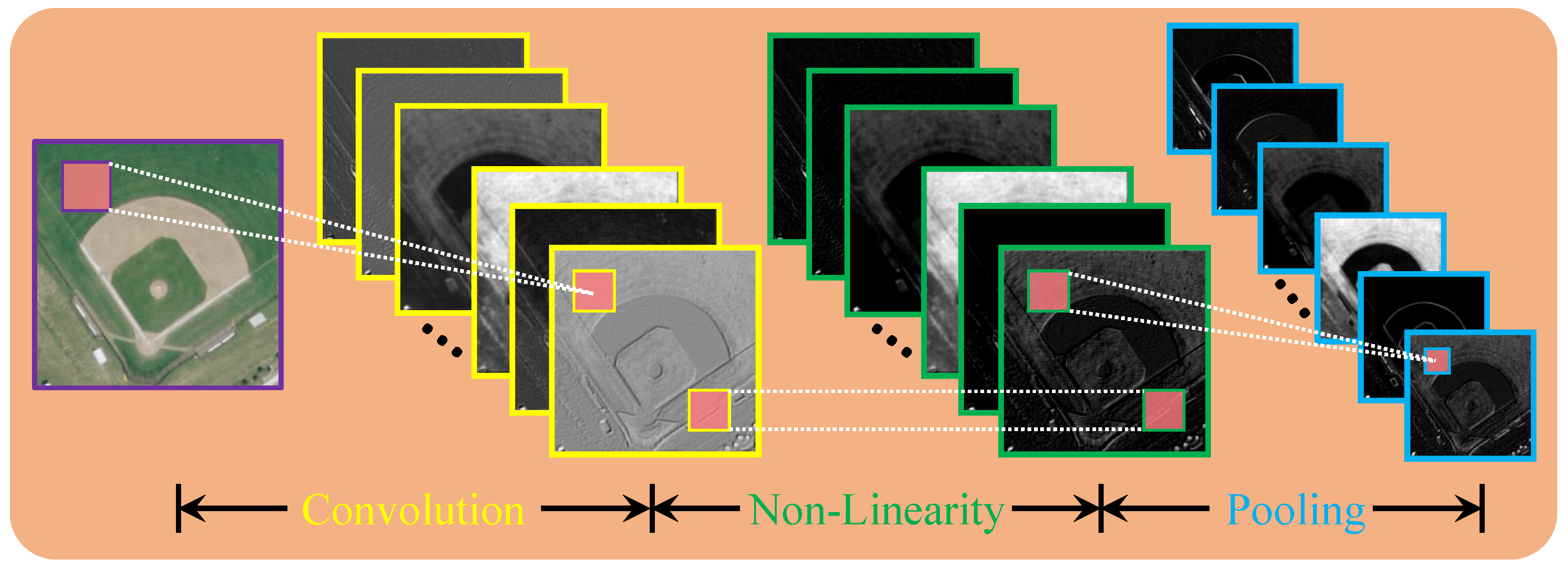
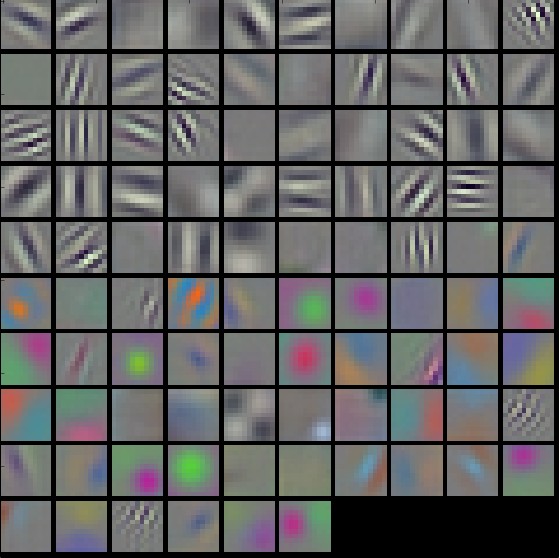
Redes neuronales convolucionales
(CNN's, ConvNets)
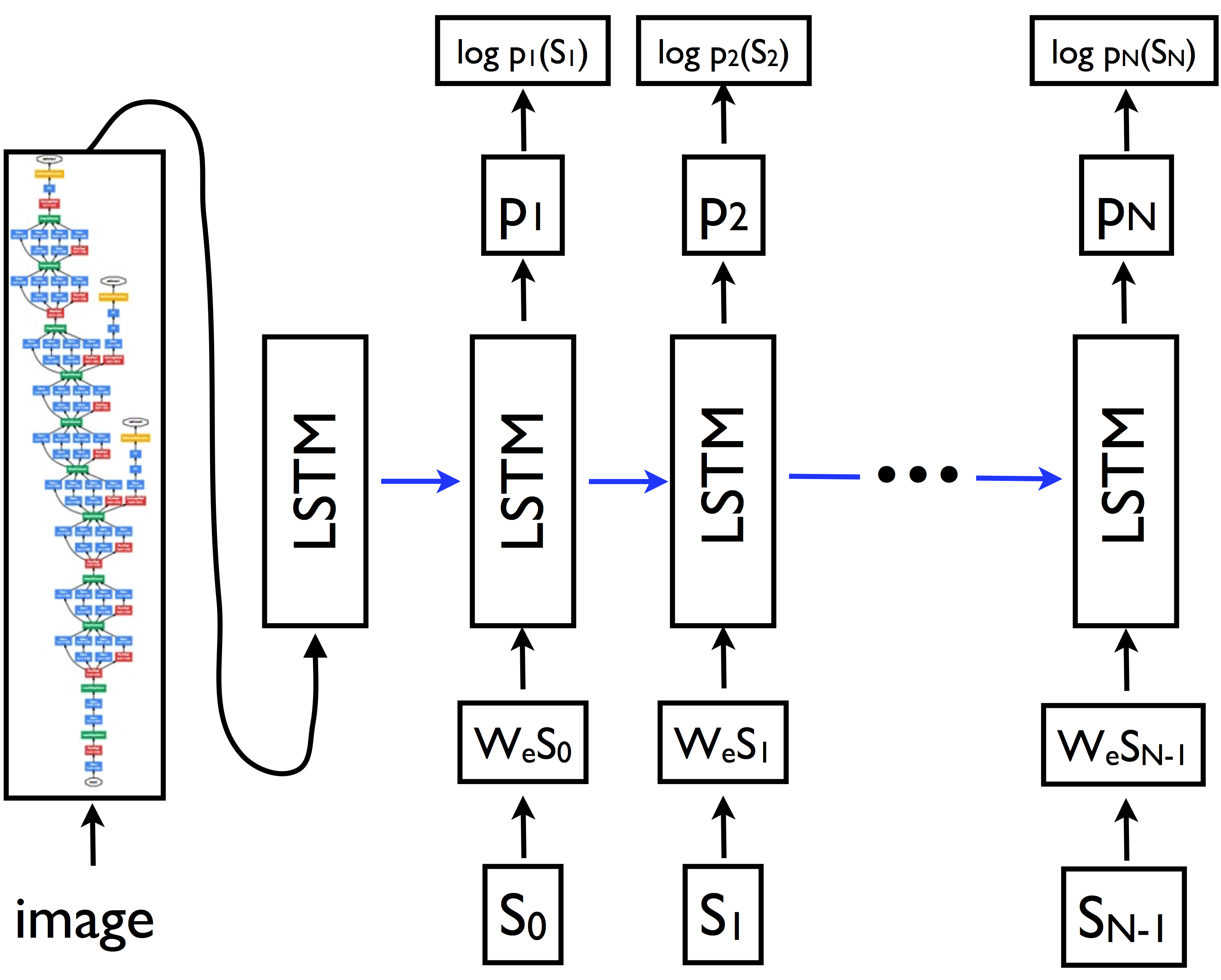
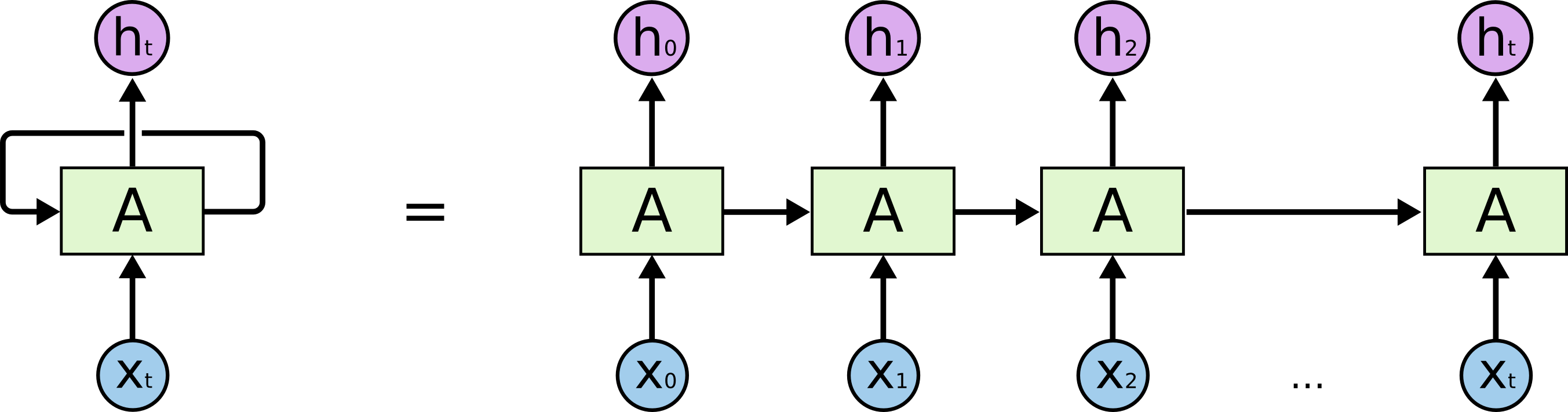
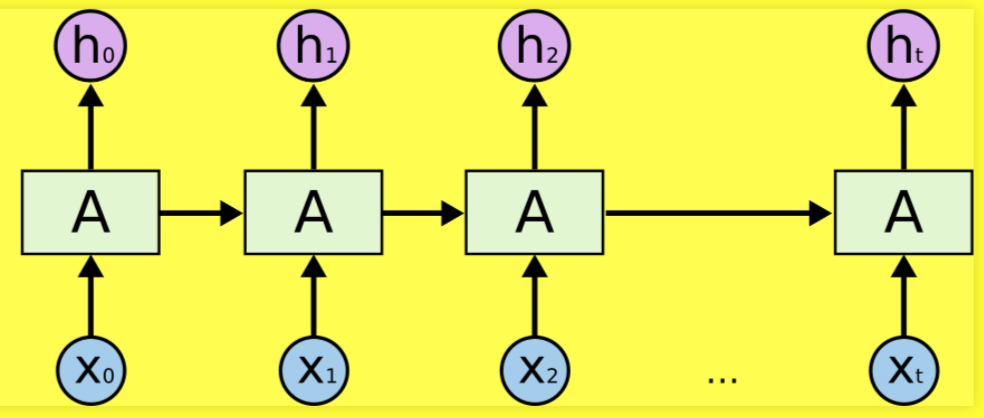
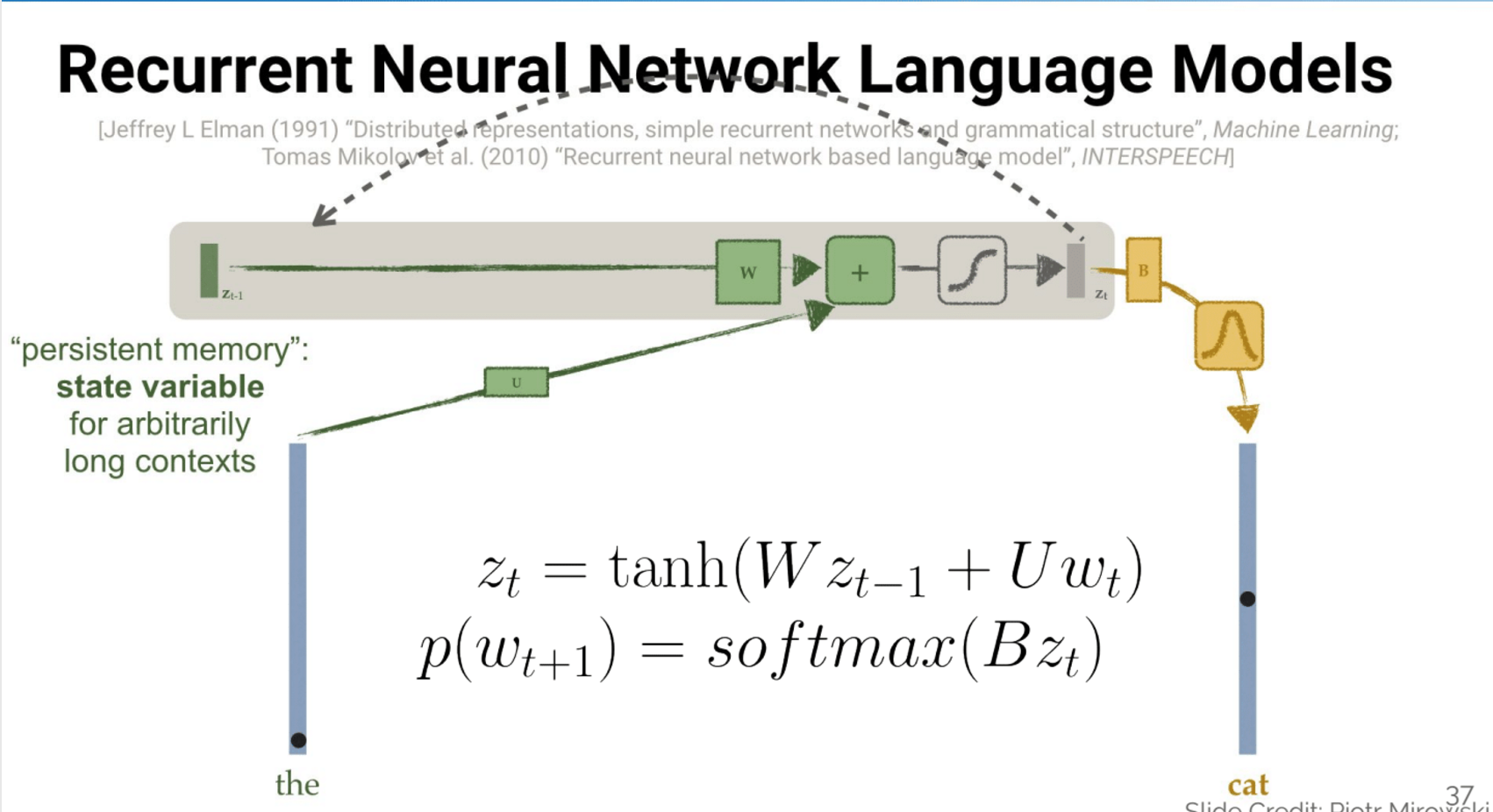
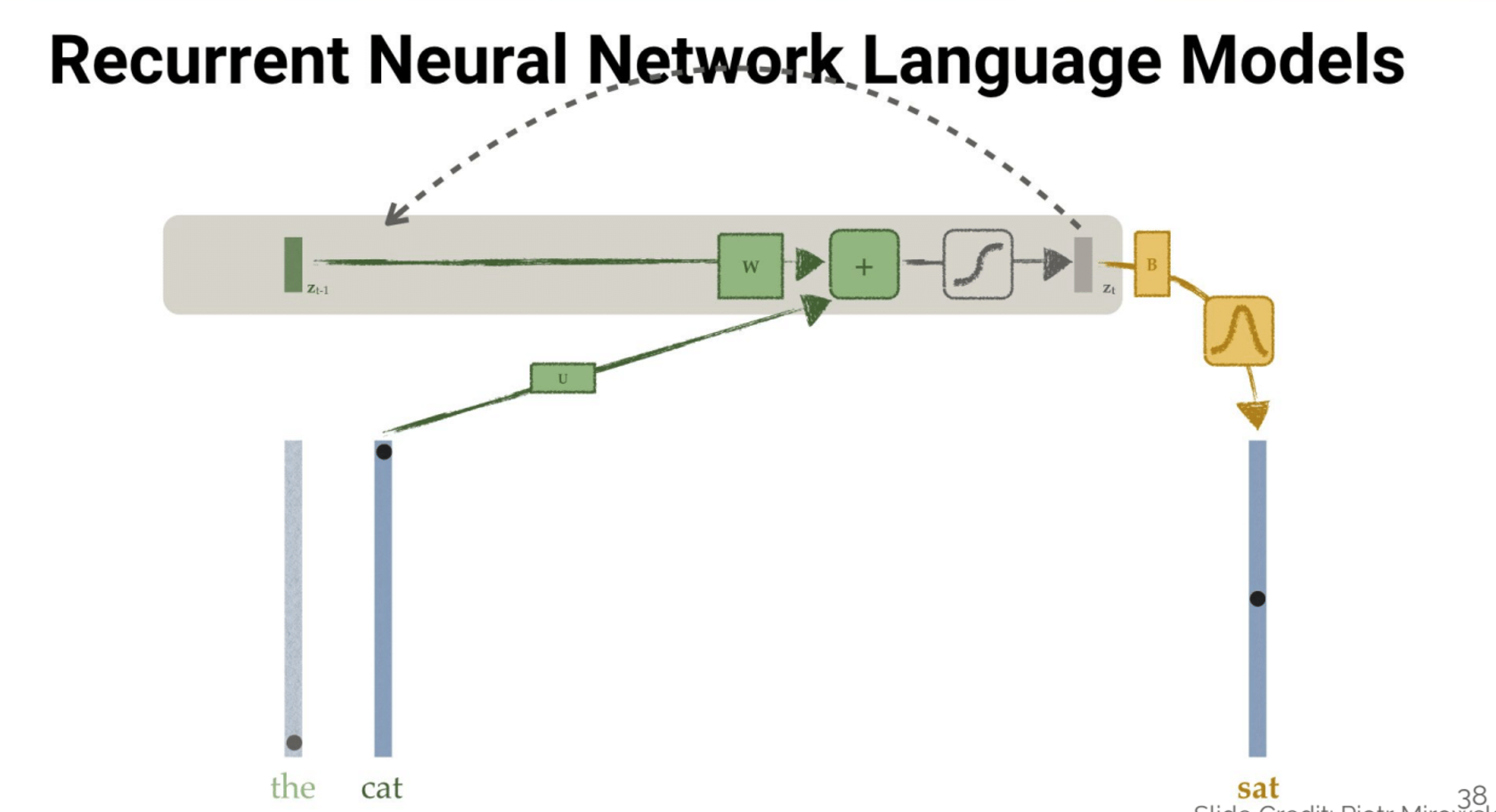
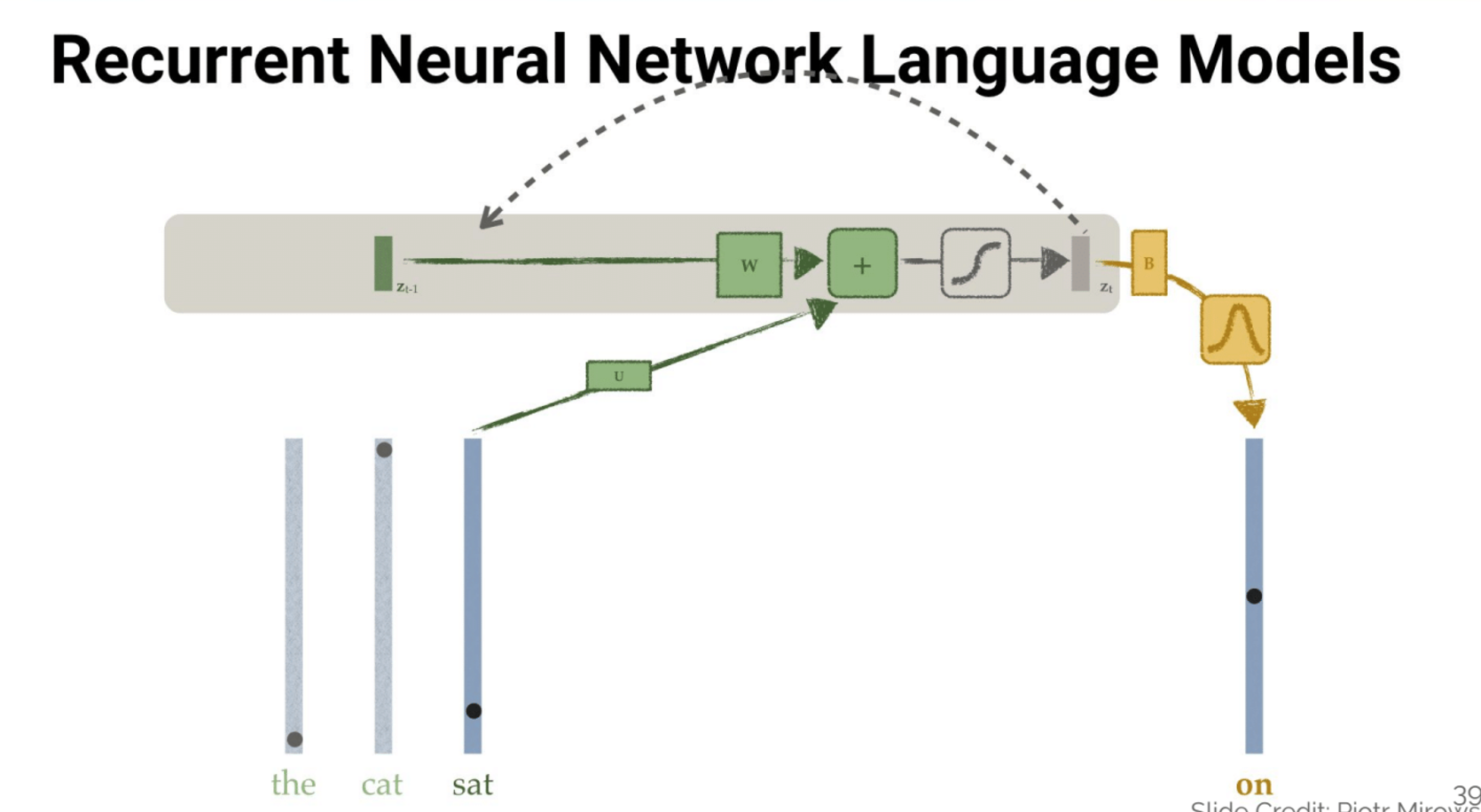
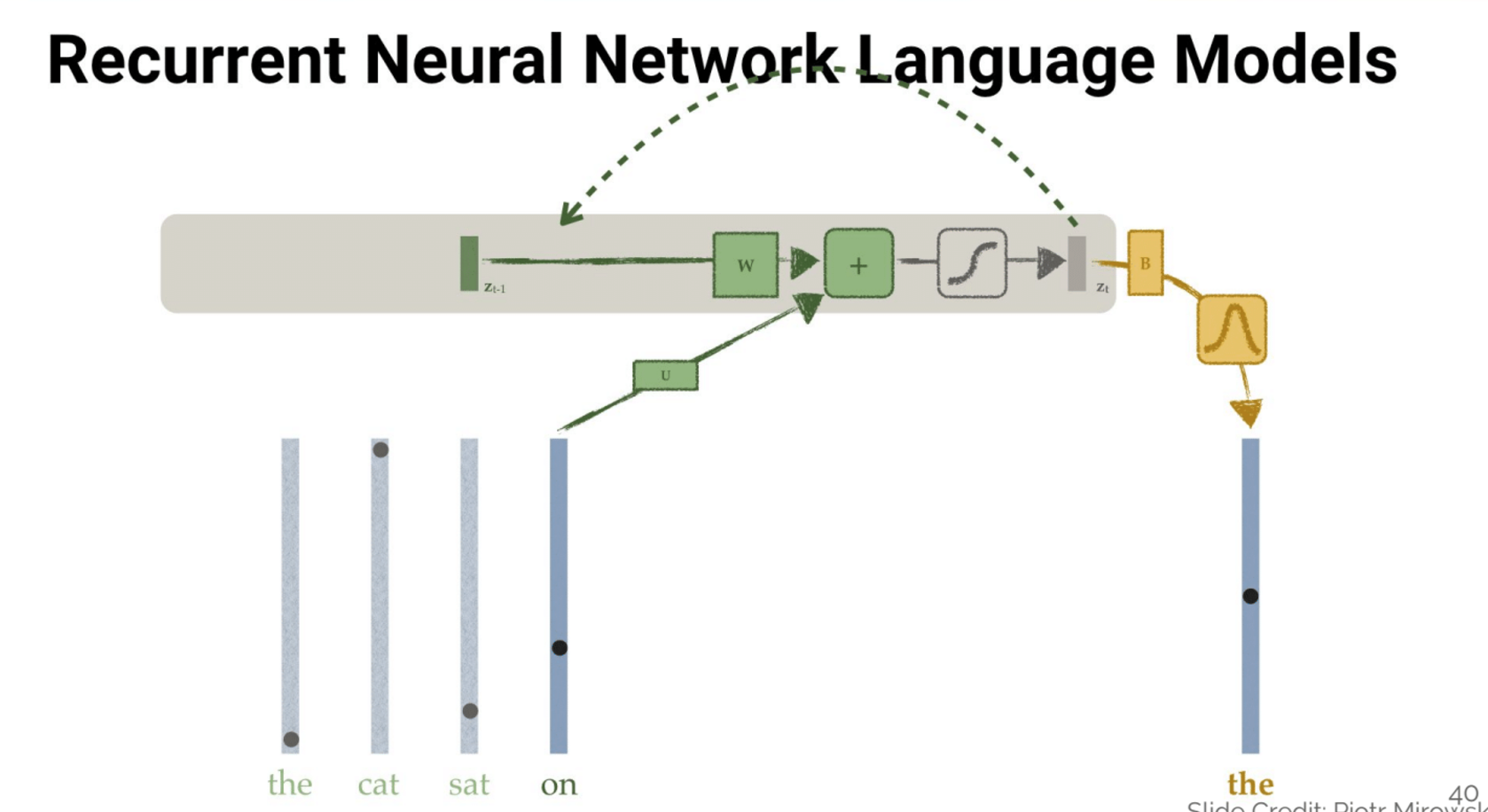
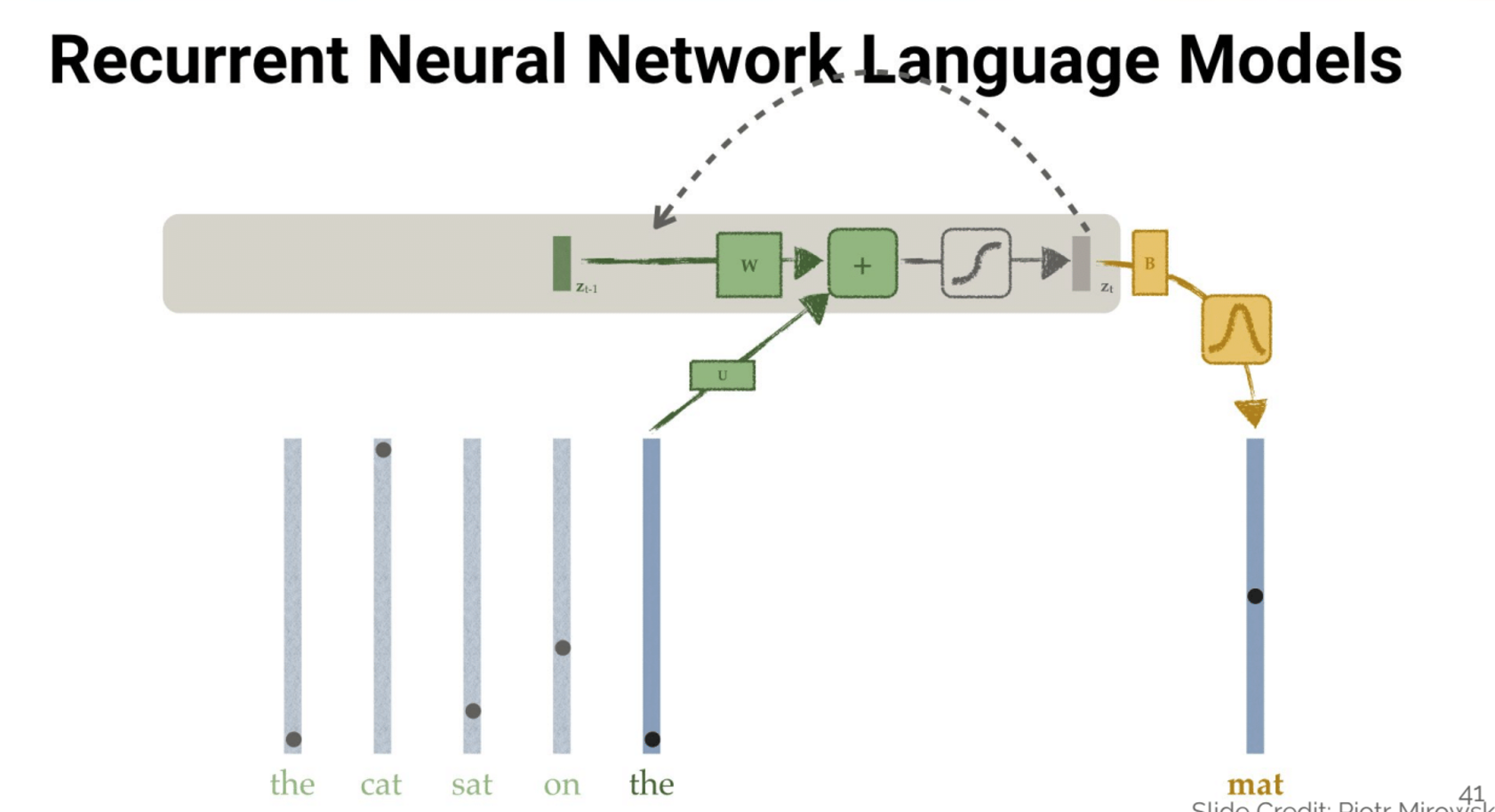
Redes neuronales recurrentes
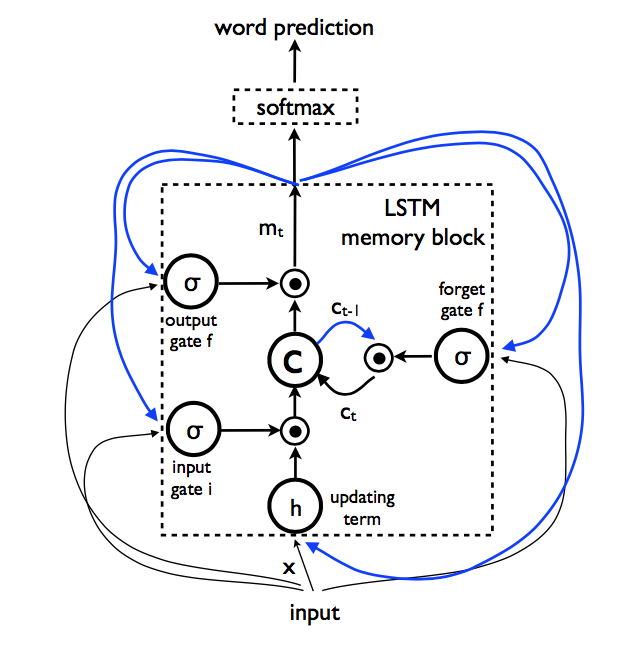
Unidad de memoria grande a corto plazo (LSTM)
Arquitectura unificada
$$+$$
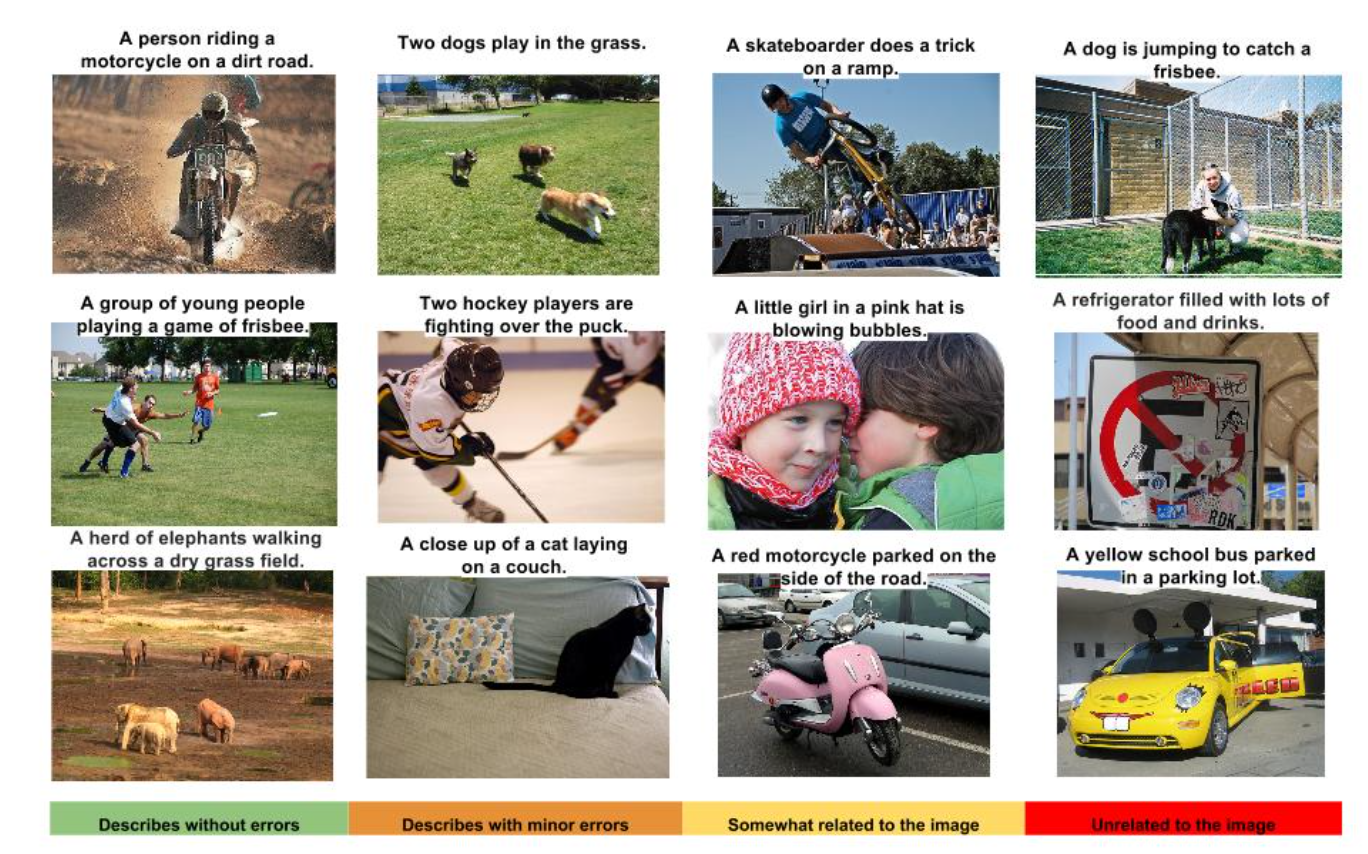
Datos
Entrenamiento e inferencia
Experimentos
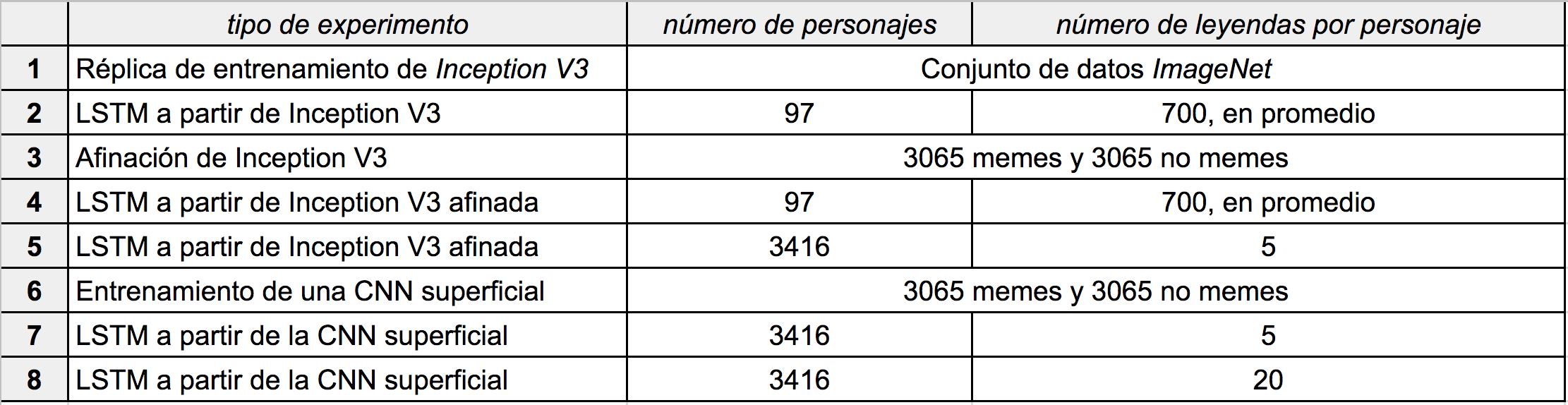
Dos modelos resultantes de los experimentos...
- Modelo A:
- Arquitectura convolucional superficial
- Modelo B:
- Arquitectura convolucional Inception V3
- Modelo afinado con las imágenes de memes
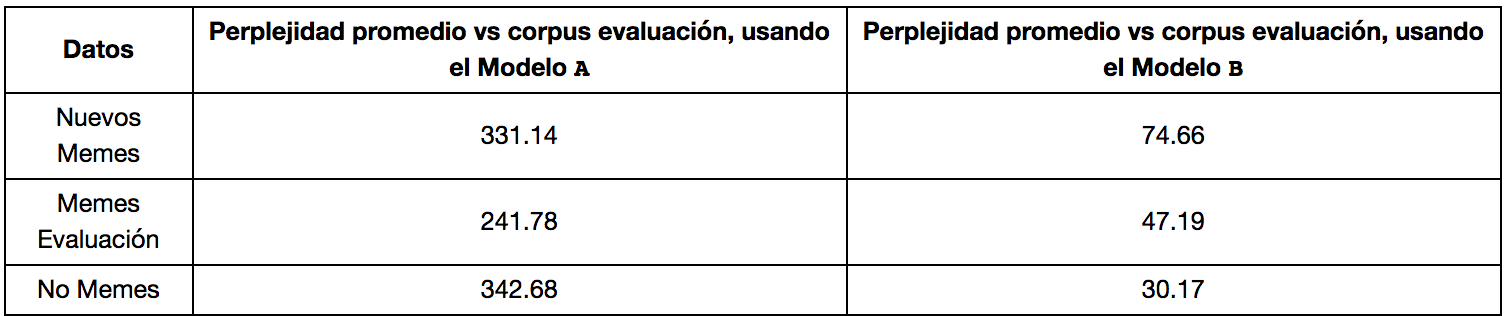
Evaluación
¿Qué tanto se parece el texto generado a un modelo de lenguaje natural?
Perplejidad
$$PP(S) = p(s_1 s_2 \ldots s_n)^{-\frac{1}{n}}$$"Nuevos" memes

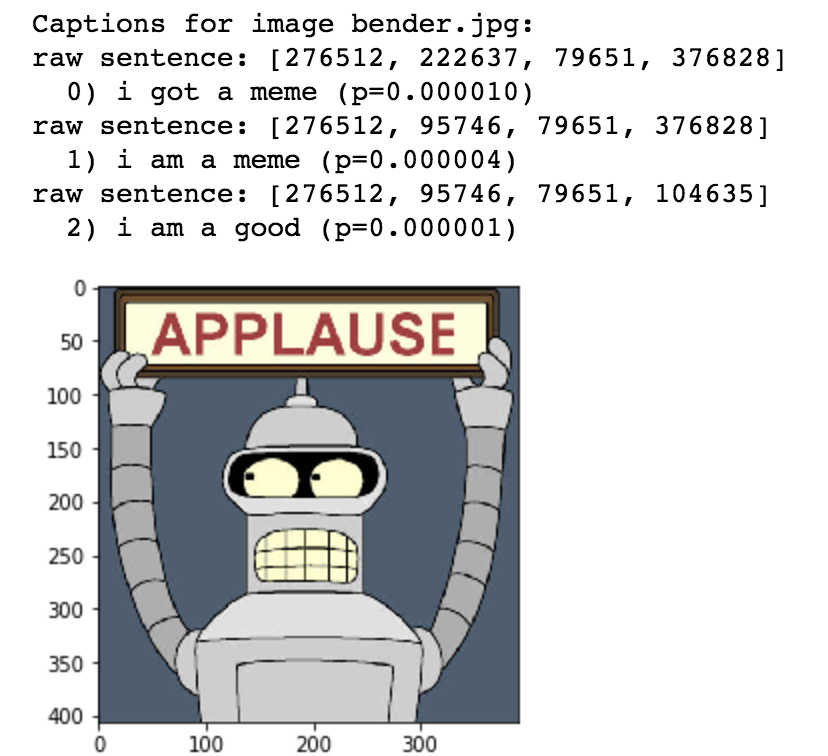
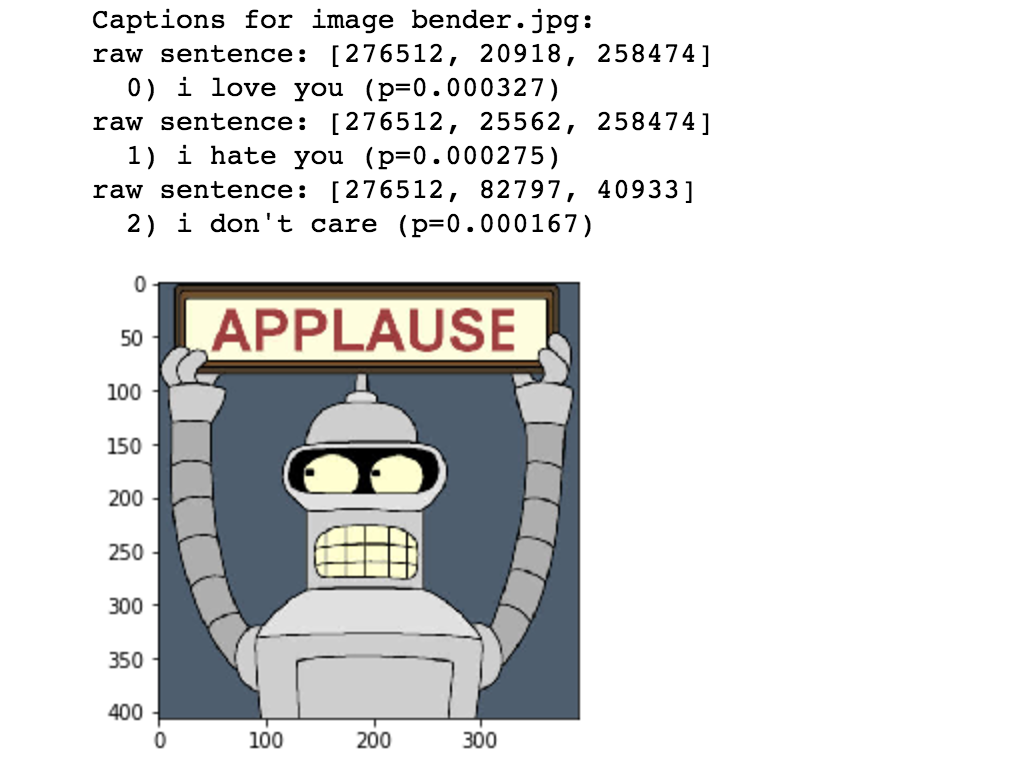
Memes del conjunto de evaluación

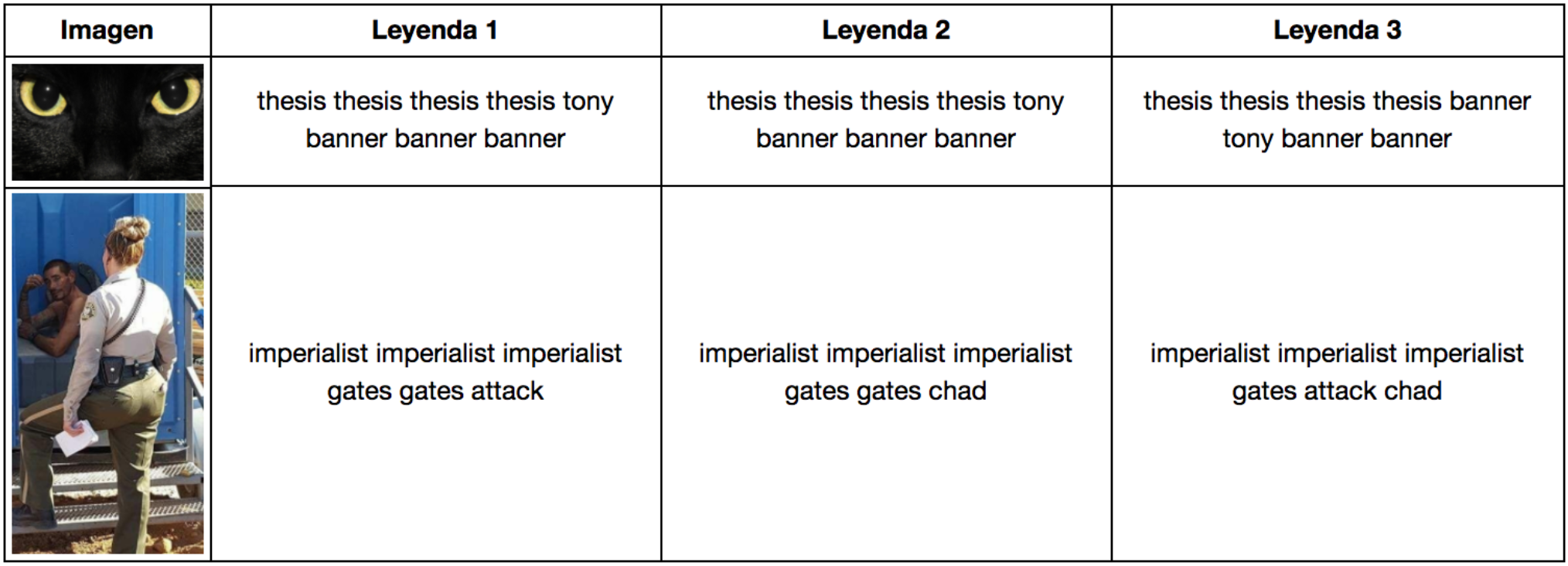
"No" memes


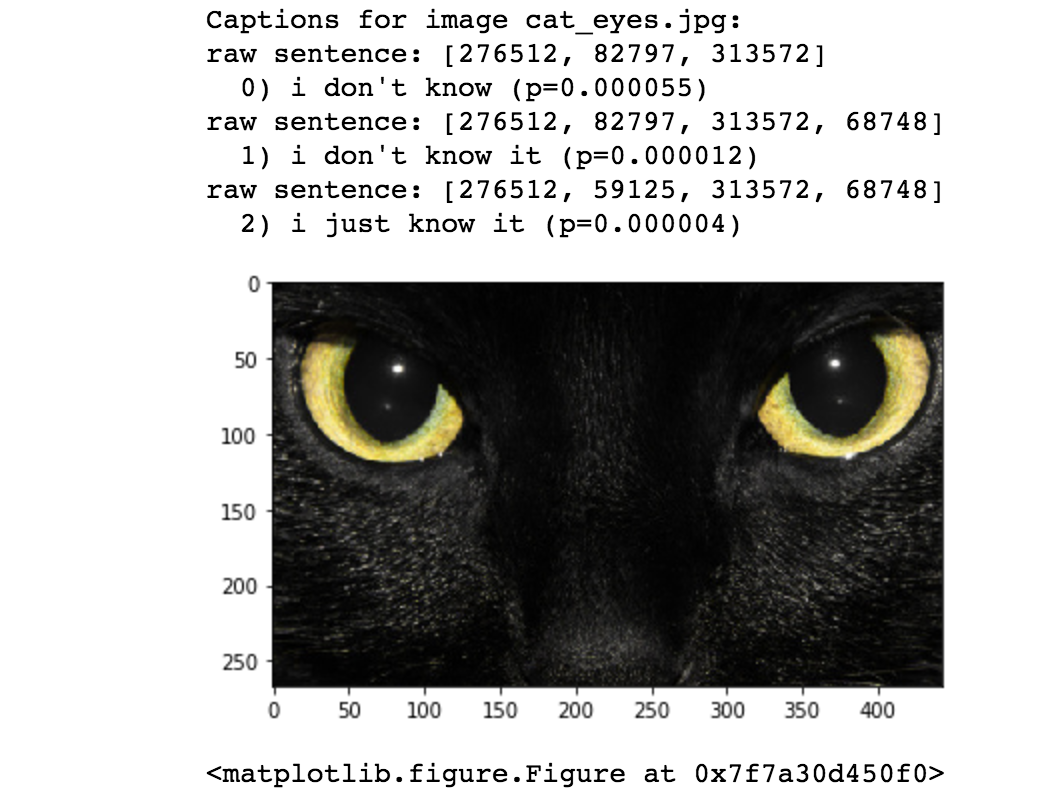
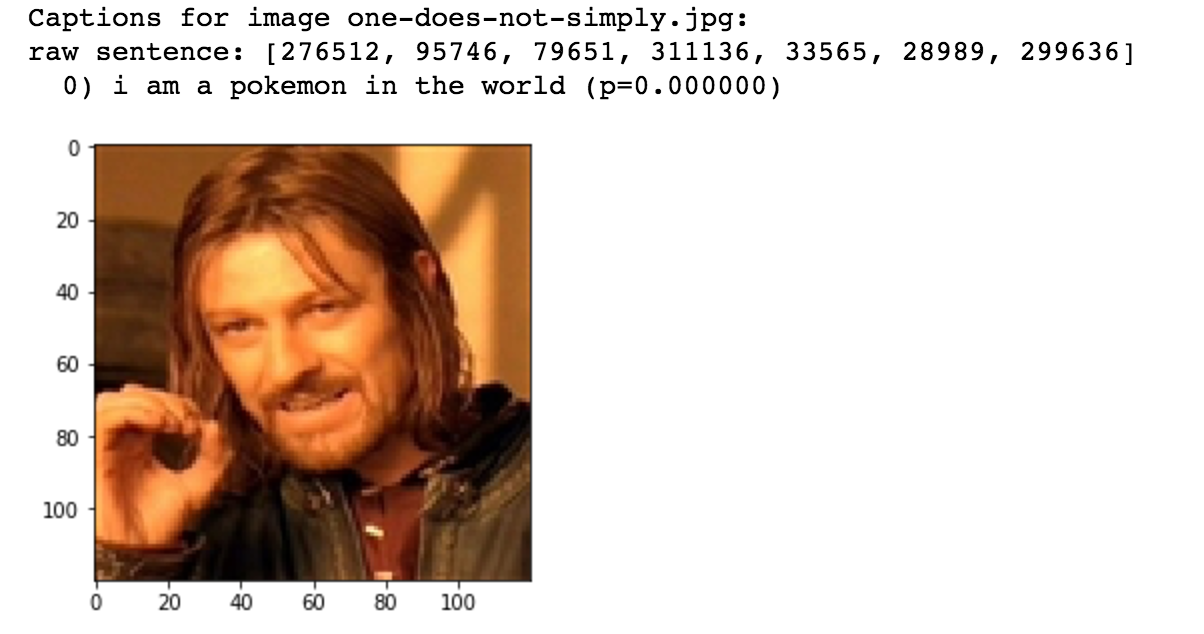
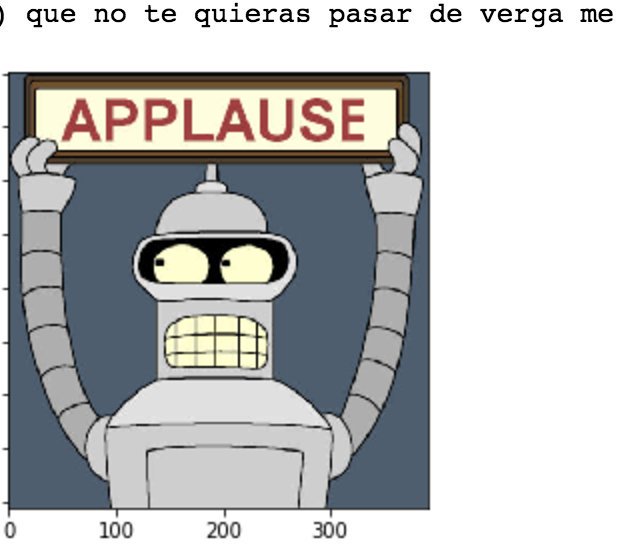
La red neuronal en acción
Conclusiones
- Se reunió una gran cantidad de memes separados por imagen y leyenda.
- Se siguió una metodología de aprendizaje profundo para extracción de características en imágenes.
- Con lo anterior, se entrenó un modelo neuronal capaz de aprender a generar texto a partir de una imagen
- El éxito de arquitecturas de gran profundidad (para la presente tarea) es proporcional al número de datos que se puedan añadir al entrenamiento.
Trabajo futuro
- Refinamiento del modelo de lenguaje con técnicas de detección y creación de humor/albures.
- Experimentación con memes de 2017.
- Agrupamiento semántico de memes (aprendizaje no supervisado).

Trabajo futuro
- Estudio de la "viralidad" que puede alcanzar la información generada automáticamente.
- Estudio del fenómeno de la evolución en propagación de información.
Trabajo futuro
- Generación automática de contenido en redes sociales (por ejemplo, bots en Twitter).
- Interacción humano-máquina.
- Agentes conversacionales (chatbots).
¡Muchas gracias!

Anexos
Afinación de una CNN